Montando o Pixhawk¶
Orientação do Piloto Automático¶
Por padrão, o controlador de voo e a bússola externa devem ser colocados na estrutura da aeronave orientados de modo que a seta aponte para a frente do veículo. Se a placa ou a bússola externa estiverem em qualquer outra orientação, será necessário corrigir a orientação no firmware.
Cálculo da Orientação¶
As compensações dos ângulos de rotação YAW, PITCH e / ou ROLL são calculados em relação à orientação vertical apontando para a frente (rotação no sentido horário em torno dos eixos Z, Y e X, respectivamente). Esse diagrama é chamado de body frame (diagrama de corpo) e a orientação padrão é dada por ROTATION_NOME.

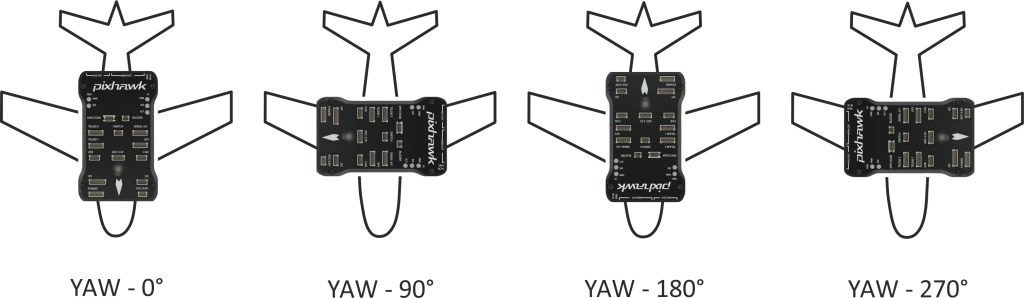
Por exemplo, a imagem abaixo apresenta rotações de aeronaves em torno do eixo z (YAW), correspondendo, respectivamente, a: ROTATION_NONE, ROTATION_YAW_90, ROTATION_YAW_180, ROTATION_YAW_270.
Definindo a Orientação¶
Para definir as orientações no firmware:
Nota
Antes de definir a orientação, o QGroundControl deve ser iniciado, conectado ao veículo e o firmware já deve ter sido instalado na placa controladora de voo.
- Selecione o ícone de engrenagem (Configuração do veículo) na barra de ferramentas superior e, em seguida, Sensors na barra lateral.
- Selecione o botão Set Orientations.
- Selecione a orientação do piloto automático, conforme calculado.
- Selecione a External Compass Orientation (Orientação da bússola externa) da mesma maneira (esta opção será exibida apenas se o seu veículo tiver uma bússola externa).
- Pressione OK.
Dica
A documentação completa sobre como ajustar a orientação do piloto automático está disponível em Orientação do piloto automático.
Isolamento de Vibrações¶
As placas Pixhawk possuem acelerômetros e giroscópios embutidos, sendo sensíveis a vibrações. Elevados níveis de vibração podem causar uma série de problemas, incluindo redução do desempenho de voo, voos mais curtos e maior desgaste do veículo. Em casos extremos, a vibração pode levar a falhas dos sensores, resultando em falhas de estimativa ou até mesmo a interrupção do voo.
Por essa razão, o Pixhawk vem com espumas de amortecimento de vibrações.
O Pixhawk deve ser montado na aeronave utilizando as espumas antivibratórias incluídas no kit. Ele deve ser posicionado o mais próximo possível do centro de gravidade do veículo.
Dica
Para determinar se os níveis de vibração estão muito altos e utilizar algumas técnicas para melhorar as características de vibração, recomenda-se o tópico PX4 user guide > Vibration Isolation.